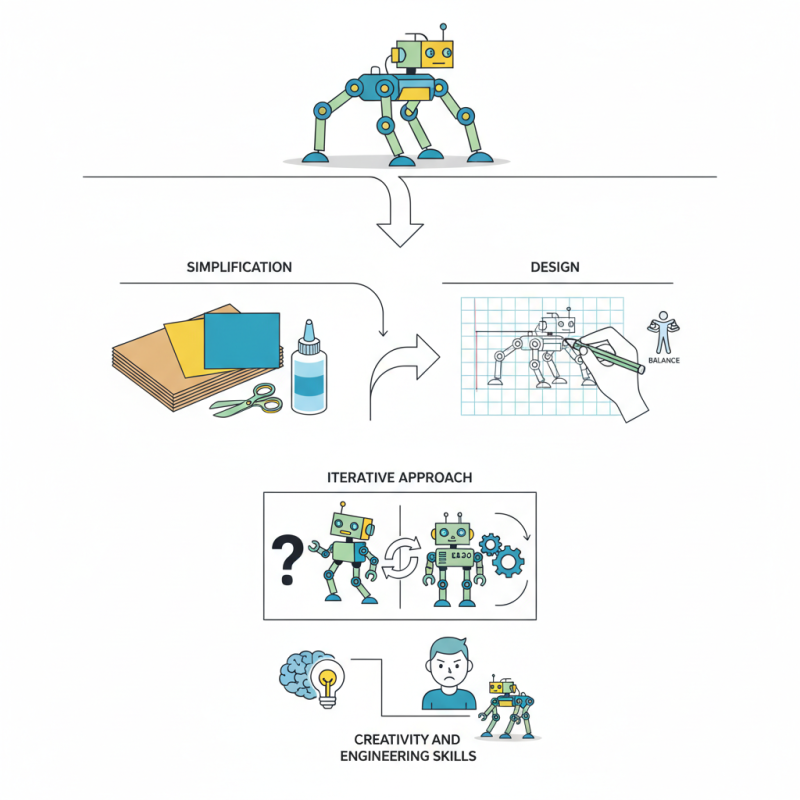
Building a 4 legged walking robot can seem challenging. However, it doesn’t have to be complicated. With the right approach, anyone can create one. This project merges creativity and engineering skills. It offers an exciting way to learn about robotics.
The key to success lies in simplification. Begin with basic materials like cardboard or plastic. Use accessible tools such as scissors and glue. The design should be straightforward. Start by sketching a simple blueprint of your robot. Each leg should be structurally sound. Balance is crucial; an unbalanced robot might fall over.
Mistakes are part of the learning process. You may encounter issues with leg movement or stability. Reflect on your design choices after each attempt. Which parts worked well? Which didn’t? This iterative approach will help refine your technique. Embrace the complexity of this project. With patience and persistence, you can create a functional 4 legged walking robot.
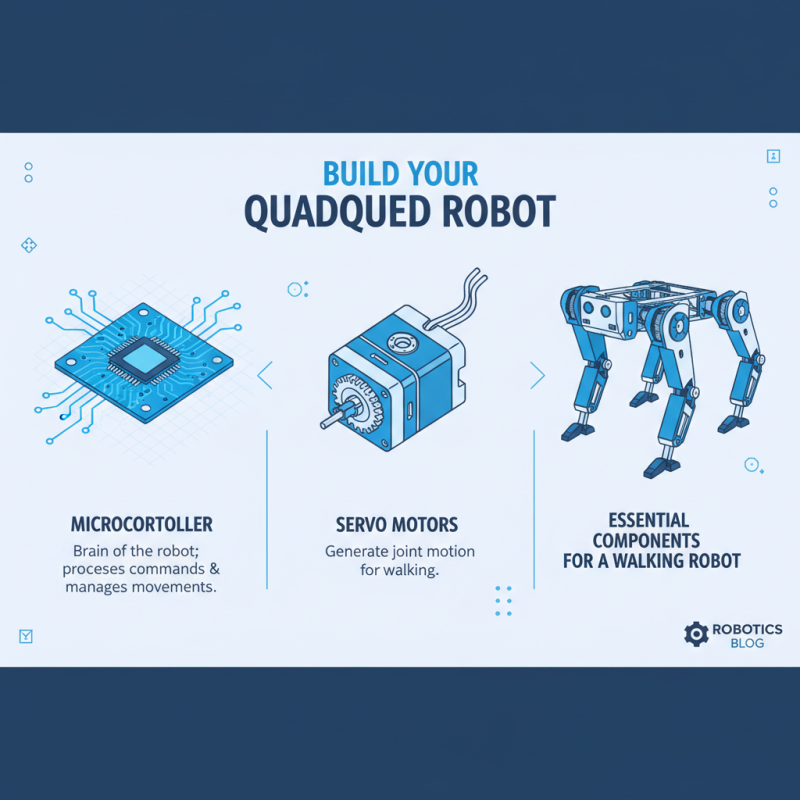
Building a four-legged walking robot can be an exciting venture. To start, you need a few essential components. A microcontroller is crucial for processing commands and managing movements. Additionally, servo motors are vital for joint movements. They generate the motion needed for walking.
Battery selection is also important. Ensure you choose a lightweight battery that provides enough power without being cumbersome. Robot legs need support. Use lightweight materials for the body and legs to maintain stability while minimizing weight. This balance is key.
Tips: Consider using plastic or aluminum for construction. They are durable yet lightweight. Testing various leg designs can lead to better stability. You'll likely face challenges during prototyping. Don't rush this process; it might take many iterations. Keep notes on what works and what doesn’t. Experimentation fuels innovation and helps refine your design.